Transplanting is the process in which seedlings are transferred from a specific place where they were sown to the soil where they will develop and produce. This process is an extremely important step in fruit and vegetable production as it helps with the initial establishment of the crop. A well-performed transplanting operation is essential to ensure acceptable initial establishment, development, and productivity of the crop.
The process of transplanting horticultural seedlings is historically carried out manually (Figure 1). This process is tedious, costly, and susceptible to errors because of the high concentration of people manually transplanting the crops. Manual-skill inconsistencies between field workers can lead to different seedling spacing, depth, and burial.
Figure 1. Onion (Bare-Root) Hand-Transplanting.

Mechanical transplanters have emerged as important agricultural machines for farmers. This equipment was designed to automate and optimize the transplanting process, replacing conventional manual work. Commercially available machines on the market offer higher precision than conventional methods during seedling transplanting, and can maintain uniform depth and spacing. Both of these essential variables lead to better plant development. Furthermore, the speed and efficiency provided by these machines also result in valuable labor and wage savings and allow large-scale transplanting operations.
Mechanical transplanters are designed and developed to transplant a wide range of seedling types and are adaptable to different soil types and production systems (e.g., raised beds, flat ground, etc.). Two common types of transplants include plug-root seedlings (Figure 2A), and bare-root seedlings (Figure?2B). Plug-root seedlings are grown in trays, usually in greenhouses, whereas bare-root seedlings are raised in field beds (ground). The difference in the weight, size, and shape between these two types of seedlings will also determine the type of mechanical transplanter that should be used to perform their transplanting.
Figure 2. Two Different Types of Seedlings Commonly Used for Mechanical Transplanting.
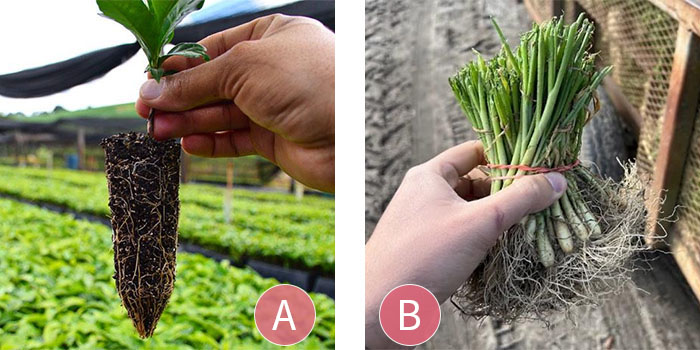
(A) Plug-root seedlings. (B) Bare-root seedlings. Photos: GosFlorestal.
Types of Machines
There is a wide diversity of machines for transplanting currently in the market, and each one is designed to meet different grower and farm size needs (e.g., small, medium, or large farms). Common models and types of transplanters currently available are listed below.
Manual Seedling Transplanters
As the name suggests, these implements are manually operated (Figure 3). They are typically used for smaller farms or home gardens where there’s no need for controlling plant-to-plant spacing or population (even though a person can do a good job using it). With these, the transplanting speed and efficiency are also decreased. The seedlings are inserted from the top and carried through the seedling tube to the bottom by gravity.
Figure 3. Manual Transplanter. Photo: TerraTeck.

Semiautomatic Seedling Transplanters
An example of semi-automatic transplanters is described the section on “Carrousel”-type mechanical transplanters (Figure 5).
Semiautomatic transplanters are not fully automated, so these machines still require human operation. These transplanters are usually equipped with an automatic seedling meter and a transplanting device (which can vary depending on the type of transplanter). These components are driven by the tractor’s power take off (PTO) shaft or a mechanical transmission system (driving wheel, chains, and gears).
Giving more emphasis on the active components of these transplanters (hydraulic and mechanical), most transplanters available on the market are equipped with a driving wheel to drive the passive components. Similar to a row-crop planter, users must adjust a combination of gears to control the spin of the passive components (meter and transplanting device) to effectively control and set basic variables like seedling spacing.
The operational capacity and efficiency of this type of transplanter is higher when compared to a manual mechanical transplanter because of the option to transplant more than one row simultaneously. In addition, there is a reduction in labor requirements and an increase in ergonomics. Semiautomatic seedling transplanters are a good alternative for medium- or large-sized fields. The working capacity of these transplanters is partially dependent on human labor. Hand labor is required to separate the seedlings and fill the seedling meters individually.
Automatic Transplanters
Automatic machines are built to perform a completely automated transplanting operation without human intervention starting from metering the seedlings, furrow opening, seedling transplanting, and furrow closing (Figure 4). The only hand-performed task required in this operation is to restock the machine with more plants. Automatic transplanters can be split into two categories: tractor-mounted or autonomous.
Automatic Transplanters Mounted on a Tractor or Another Vehicle
Transplanters mounted on a tractor or another utility vehicle (UTV) require a tractor or UTV driver to guide them into the fields, but as stated above, there is no need for a person to perform any kind of task except refilling the transplanter with more plants.
Figure 4. Automatic Transplanters.
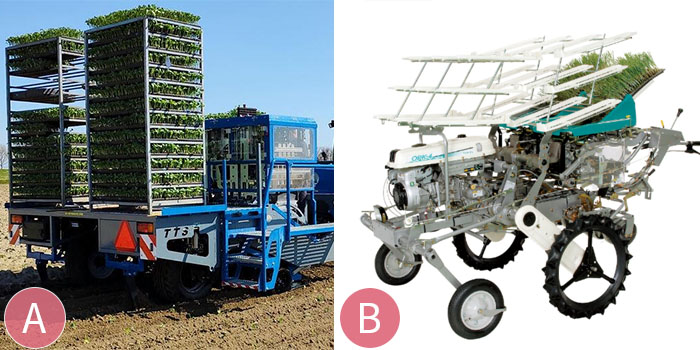
(A) Tractor-mounted and (B) UTV-mounted.
Photos: (A) TTS Transplanter, (B) Japan Agri-Trading.
Autonomous Transplanters
Autonomous transplanters are, for now, concepts or models for which very few options are commercially available. These examples are inside of the autonomy levels 4 and 5 (see below), which means there is no need for human intervention to perform any driving tasks.
According to the Society of Automotive Engineers (SAE, 2021), there are five different levels of automation:
- 0 means no driving automation.
- 0 to 2 means there is a need for driving assistance.
- 3 to 5 means there is no need for driving assistance.
- 5 means full driving automation.
Basic Functions
The basic functions of a mechanical transplanter are similar to a row-crop planter (corn, soybeans, cotton, etc.) if you are familiar with those. As there are different models for different uses, some basic functions can vary depending on which transplanter you are using. The basic functions of a transplanter include:
- Soil strip tilling/furrow opening: Depending on the machinery type and model, the mechanical transplanters are equipped with different soil tilling and furrow opening mechanisms. This step prepares the soil for transplanting.
- Seedling metering and distribution: The main function of the transplanters is transplanting; however, some machines will also separate and meter the seedlings as the example of automatic transplanters stated above.
- Seedling population control: Transmission systems, mechanical (gears), or hydraulic (PTO-driven) are used to control the metering systems in order to meter each seedling and transplant it for an optimum population.
- Seedling depth control: Each seedling (e.g., tree fruit variety, vegetable variety) requires a different seedling depth according to the soil it is being transplanted into. Therefore, each transplanter is equipped with depth-control systems.
- Furrow closing and compaction: Similarly to conventional row crop planters, some transplanters are equipped with furrow-closing systems, which can be closing wheels, or different systems adapted for each model. In addition to furrow-closing, these systems help to increase seedling rooting system contact with the soil.
- Plastic mulch layer: On some mechanical transplanters, the distribution of plastic mulch over the raised beds or flat-ground can be performed prior to the transplanting process. A plastic mulch distribution system is positioned in between the transplanter and the tractor.
- Targeted water distribution: Some transplanted crops require or respond well to at-plant watering. This irrigation water applied directly onto transplants or in transplant holes is the most efficient and effective way to irrigate newly planted crops whose root systems are not developed. Some mechanical transplanters can be equipped with water tanks, hoses, and nozzles to irrigate each plant when transplanted. The irrigation can be manual or automated, using solenoids that open and close the nozzles on predetermined time intervals or using sensors to activate the solenoids.
Classification and Constitution
In addition to the types of machines listed above, mechanical transplanters can be further classified according to the transplanting units and the systems used to meter the seedlings for transplanting. The different classifications are listed below.
“Carrousel”-Type Mechanical Transplanters
The transplanting units of these machines use a rotary device to meter the seedlings. The rotary device is commonly called a carrousel, which opens and closes to drop the seedlings into the seedling tube, guiding the seedlings to the soil. The speed of the carrousel is adjusted to attain the desired population.
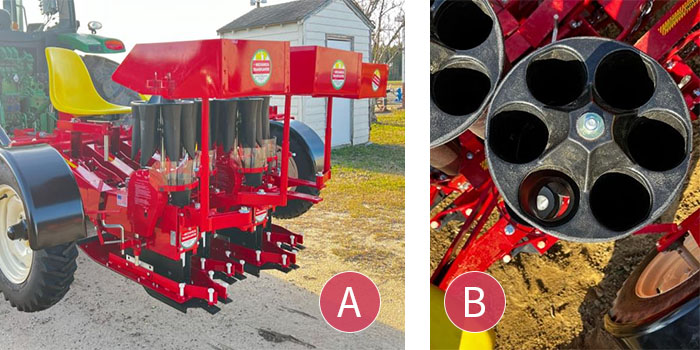
Each carrousel is composed of several cups in which each seedling is manually placed. The quantity of cups varies depending on the size of the seedlings to be transplanted and the manufacturer. The carrousels rotate in the same direction, and, using a mechanical actuator, the bottom of the cups will open (Figure 5 B) when rotating over the seedling tube (Figure 6) to drive the seedlings to the ground.
Figure 5. Carrousel-Type Transplanter With Four Transplanting Units (A) Versus a Single Carrousel (B).
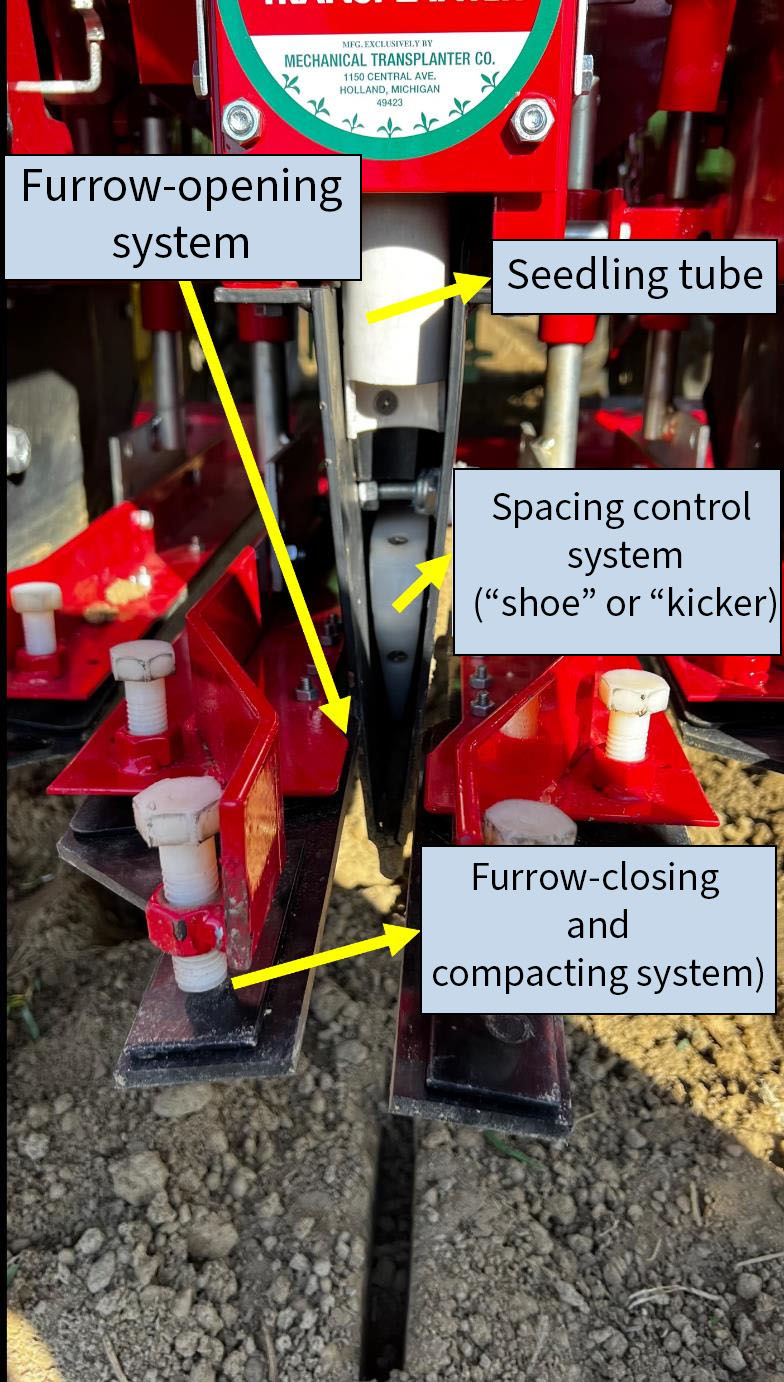
A furrow-opening cultivator opens the furrow (Figure 6) before transplanting the seedling. When the seedling is transplanted into the ground, a closing system closes and compacts the trench to create better contact with the seedling’s root system and the soil. The seedling depth and the intensity of furrow closing and compaction can also be calibrated and adjusted depending on the soil conditions and seedling physiological needs.
Some carrousel transplanters are also equipped with seedling spacing control systems. These systems are often referred to as “kicker” or “shoe,” in which its movement is synchronized with the rotation of the carrousel reservoirs. When the carrousel reservoir opens, the seedling falls in front of the kicker, which will move or guide the seedling toward the back of the transplanter. This movement allows the seedling to follow the relative velocity of the tractor and generates more uniformity in seedling spacing. In Figure 6, we can see that when the seedling falls through the seedling tube, there is a part that moves horizontally and literally “kicks” the seedling out of the furrow opening system. That is the reason for the nicknames “kicker” and “shoe.”
Figure 6. Carrousel Transplanter Furrow Opening and Seedling Delivery System.
These are commonly used for plug-root seedlings, as this transplanter uses the force of gravity to guide seedlings. Bareroot seedlings may not have enough mass to pass through this type of machine quickly.
Finger/Pocket-Type Transplanters
Finger transplanters use rotatory mechanical arms with “finger” systems on their ends that act as tweezers. These finger systems are meant to hold seedlings and guide them to the ground. On these type of transplanters, the seedlings are manually inserted into the fingers (Figure 7) and transported to the ground.
The mechanical arms are placed on a fixed horizontal axle and are moved in a vertical direction. These machines are also equipped with a furrow-opener. The finger-type transplanters are often used for transplanting bareroot seedlings because they usually have inadequate mass/volume to be conducted to the furrow using their own weight. Because these transplanters are not equipped with any metering system such as the carrousel, the seedlings must be placed one-by-one in the fingers manually.
Figure 7. Finger-Type Transplanter.
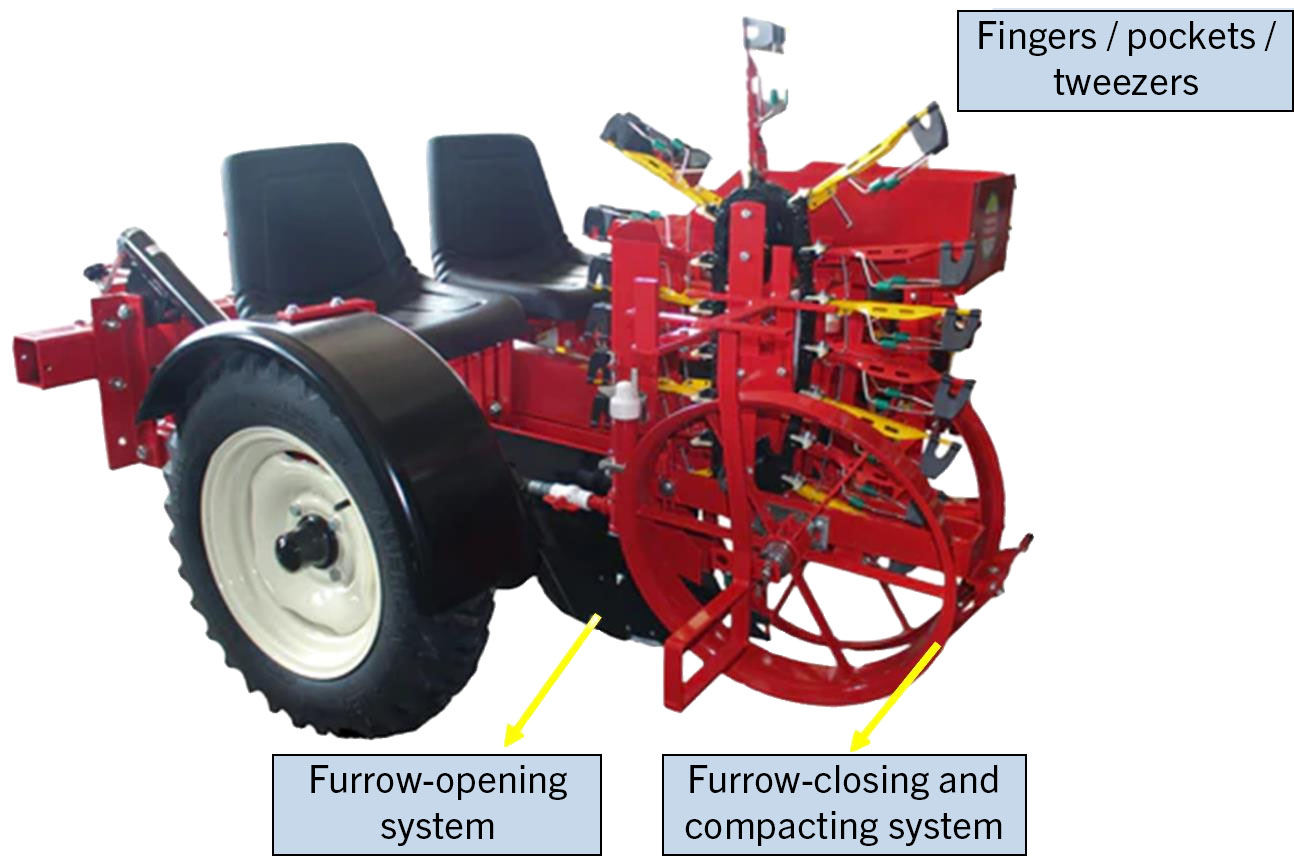
Photo: Mechanical Transplanter.
Dibbling-Type Transplanter
The distribution system of dibbling-type transplanters is similar to the distribution system of carrousel transplanters with rotary cups. The main difference between the cup-type and carrousel transplanters is that dibbling-type transplanters do not have a seedling tube. The seedlings are dropped from the cups inside the transplanting system, which is comprised of containers popularly known as soil dibblers.
The dibbling system can be found in two different variants: a rotary system or a vertical system (Figure 8). Remember that this type of transplanter does not have a seedling tube. The dibblers move up and down, digging the furrow, releasing the seedlings inside of the furrow, and closing back to get another seedling. This system is often used to transplant plug-root seedlings on plastic mulch because the dibbling system can break the plastic barrier and release the seedlings into the furrow without the need for a furrow-opening tool.
Figure 8. Dibbling-Type Transplanter.
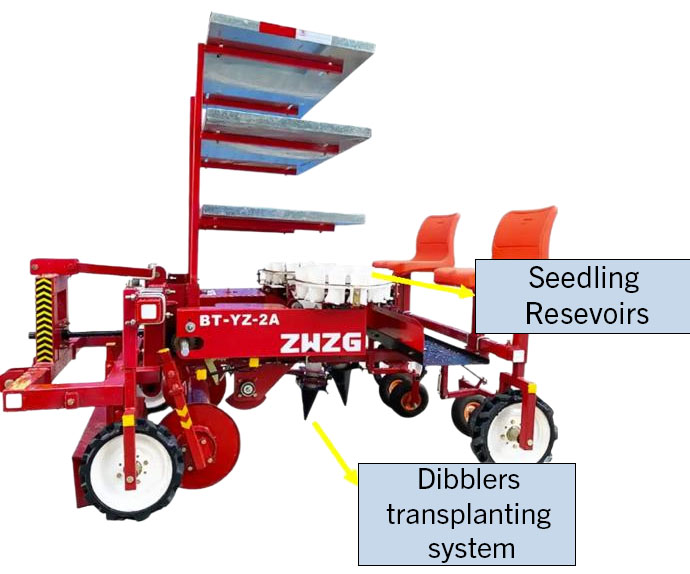
Photo: ZWZG Transplanters.
Chain-Link or Tape-Type Mechanical Transplanters
These transplanters can be found as both manual and tractor-mounted machines. This operation involves transplanting seedlings previously seeded into special biodegradable paper tape or chain-link trays (Figure 9). The biodegradable paper tape with the seedlings is detached from the trays and transported to the transplanting units on the ground through a set of mechanical systems.
Figure 9. Biodegradable Tray for Tape-Type Mechanical Transplanter.

Photo: AndNowUKnow.
Transplanting is done by using the power of a driving wheel. Similar to a finger-type transplanter, a rotary set of mechanical arms drives the seedlings to the ground and cuts the links between each seedling to maintain a uniform spacing and population (Figure 10).
Figure 10. Seedlings Transplanting From a Tape-Type Transplanter.
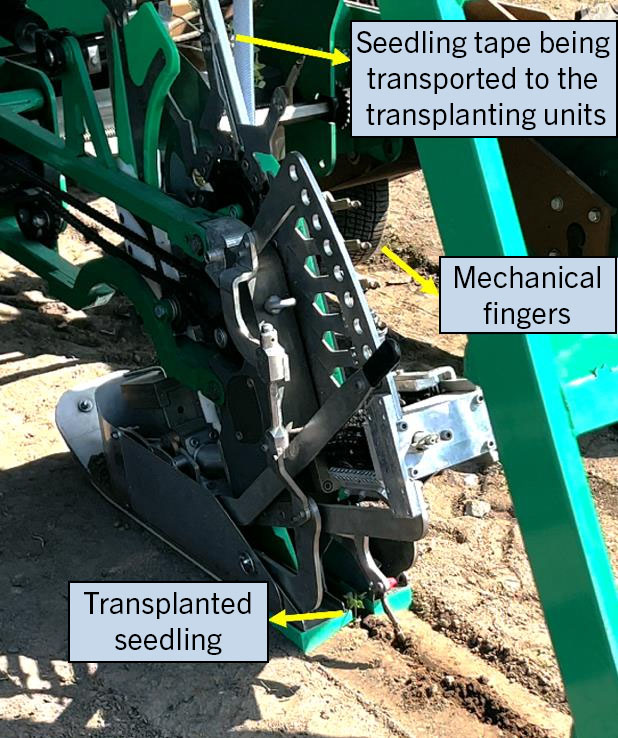
Compared to all of the transplanters mentioned above, the tape-type can transplant the widest variety of seedlings of different sizes, but it requires more upfront planning for transplanting the seedlings in special trays.
Waterwheel-Type Transplanter
Waterwheel transplanters are one of the most common types when it comes to vegetable, tobacco, and strawberry transplanting. The name “waterwheel” comes from the machine’s capability of poking holes through plastic beds while irrigating and/or fertilizing the holes (furrows) where the seedlings are transplanted. These transplanters are tractor-mounted and mostly used on plastic beds. The main difference in these machines from the others mentioned above is that the seedlings are manually inserted in the holes (Figure 11).
Figure 11. Waterwheel Transplanter.

Photo: Timothy Coolong.
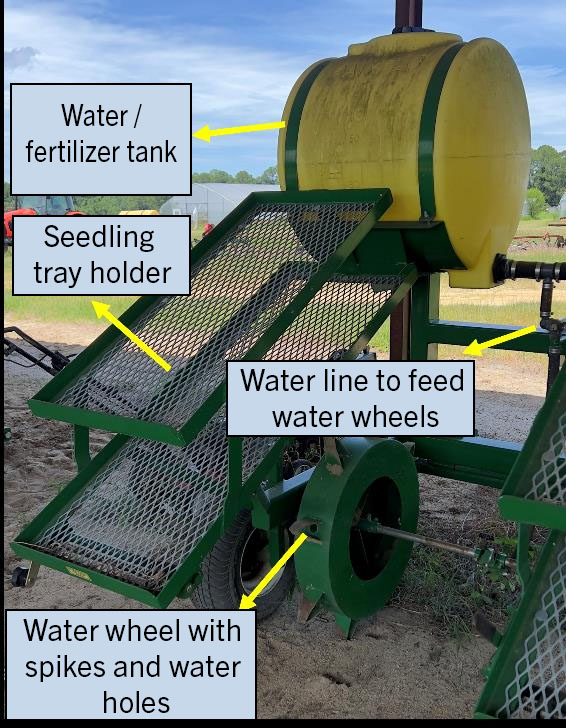
Figure 12 shows the components of a waterwheel transplanter. The tanks are filled with water, which may include fertilizers or other nutrients. As the tractor moves forward, the waterwheels rotate and press into the soil. The wheels have spikes that puncture the soil at regular intervals, creating planting holes. Simultaneously, water from the tanks is released through the spikes and holes into the planting furrow. This moistens the soil, creating an optimal environment for the seedlings. Afterward, workers sitting on the transplanter manually place seedlings into the holes created by the waterwheels. The moistened soil makes it easier to insert the seedlings and ensures they are immediately watered.
Figure 12. Waterwheel Transplanter Parts.
Important Calibrations and Maintenance
Properly adjusting a mechanical transplanter requires technical knowledge, like an understanding of the mechanics of the machinery as well as the agronomic practices of the operation. Factors such as population, spacing between plants, spacing between rows, and seedling depth will be determined during the adjustments. Depth is one of the factors that requires more attention, as it varies depending on the crop, age of the transplant, type of soil, and dry or wet weather during the transplanting period. If planted too deep, the seedling's aboveground vegetative organs are placed in contact with the soil, making it susceptible to pests and soilborne diseases. If planted too shallow, the seedling may spend more energy on the development of its root system to reach the moisture and nutrients present in the deeper layers of the soil.
The adjustment of spacing between plants varies according to the characteristics of the crop in relation to competition for water, nutrients, and exposure to sunlight between the plants. Larger spacings are observed in perennial or semiperennial plants, such as fruit trees and nut trees. The spacing between rows follows the same criteria observed for the spacing between plants. Growers also must consider the space required for the track width of the equipment that will manage the area, such as sprayers, fertilizers, and auxiliary vehicles in the harvest.
The furrow-closing system also plays an important role in transplanting. When adjusted well, it increases the contact of the root system with the soil, removes air pockets, and prevents surface runoff of water from exposing the seedlings' roots. If the furrow-closing system exerts too much pressure, it can compact the soil near the rhizosphere (the soil that surrounds the roots) and delay root development; on the other hand, if the system does not apply enough pressure, the roots may be exposed.
The majority of mechanical transplanters are equipped with a mechanical transmission composed of gears and chains (Figure 13). The calibration of the gears is essential for uniform plant spacing. To adjust plant spacing, the operator must select the desired spacing and adjust the chains on a set of gears present on the gear box.
Figure 13. Transmission Table for a Carrousel Transplanter.
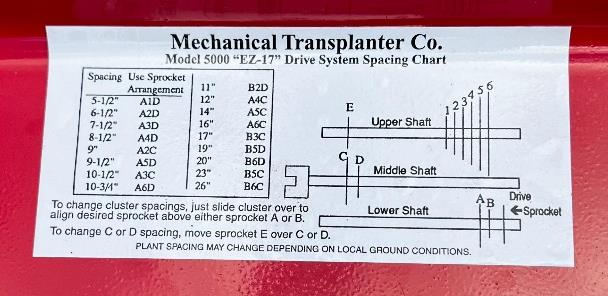
Newer machines will have the option for electric or electrohydraulic adjustments. The settings can be adjusted through the onboard computer, and the system automatically controls plant spacing and population by adjusting the rotary speed from the gears.
Regardless of the type of equipment used, preventive maintenance is vital for the proper functioning of the transplanters, as it maintains the adjustment constant, coordinates transplanting, and reduces the wear and tear of the moving parts of the mechanism, which increases the working time of the machine and its operational yield. Effective preventive maintenance involves applying lubricants to the moving components after a certain number of hours worked (period determined by the manufacturer); checking the tightness of the fixing screws, which can come loose because of the vibration produced by the operation of the equipment; and replacement of worn parts. This keeps problems from getting worse and prevents breakdown of other parts during use, which could lead to delays in the transplanting process and/or poor quality of the operation.
If you have any questions about mechanical transplanters, their functionality, or their applications, please contact this 海角官方首页 Extension publication's author, Luan Oliveira.
References
Donnel, J. (2015). Tanimura & antle will unveil its plant tape at the London produce show. AndNowUKnow. Retrieved April 12, 2024, from
GosFlorestal. (2018). Production and marketing of coffee seedlings in tubes. GOS Ambiental.
Henan Minko Machinery Company, Ltd. (2025). Traction vegetable transplanter onion tomato sweet potat seedlings transplanting machine. Alibaba.
Kubota. (2025). Kubota full automatic onion transplanter 4 rows OPK-4. Japan Agri Trading.
Mechanical Transplanter Company. (2025). Model 1100.
SAE International. (2021). SAE levels of driving automation™ refined for clarity and international audience.
Terrateck. (2025). PL2+ forester jab planter.
Total Transplant Solutions. Twin rower. Retrieved April 12, 2024, from
Status and Revision History
In Review on Apr 25, 2025
Published on May 07, 2025